Optimizing Multi-Robot Task Allocation in Dynamic Environments via Heuristic-Guided Reinforcement Learning
Oct 19, 2024· ,,·
0 min read
,,·
0 min read
Aritra Pal
Anandsingh Chauhan
Dr. Mayank Baranwal
Ankush Ojha
Abstract
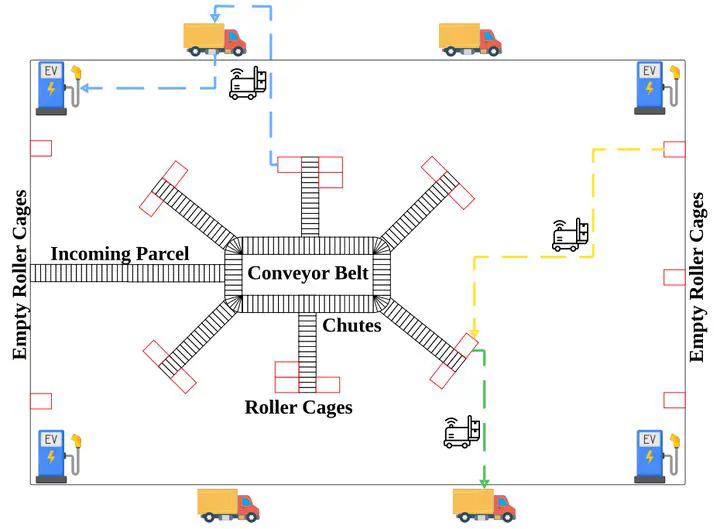
In modern warehousing environments, efficient task allocation among multiple robots is crucial for optimizing productivity and meeting the ever-increasing demands of online order fulfillment. In this paper, we address the challenging problem of real-time multi-robot task allocation (MRTA) in a warehouse setting, where tasks appear dynamically with corresponding start and end locations. The objective is to minimize both the total travel distance of robots and the delay in task execution while considering practical charging/discharging constraints and collision-free navigation. To tackle this combinatorially hard problem, we propose a heuristic guided reinforcement learning (RL) agent, HeuRAL-MATE, which learns to prioritize prompt task execution while optimizing the assignment of tasks to robots. Our proposed approach outperforms standard practices like First-In-First-Out (FIFO), as well as a brute-force optimal approach in terms of efficiency and performance. The results on multiple synthetic datasets exhibit an average cost reduction of approximately 8.58% and 10.74% in total expenses when compared with brute-force optimal approach and FIFO, respectively.
Type
Publication
In 27th Proceedings of the European Conference on Artificial Intelligence, October 2024